Розробка системи автоматичного регулювання пари при гранулюванні кормів
Слід зазначити, що мета автоматизації не обмежується лише зниженням затрат праці і підвищенням ефективності використання техніки. Вона сприяє створенню енергозберігаючих і ресурсозберігаючих технологій, а також підвищенню продуктивності тварин і птиці, урожайності сільськогосподарських культур. Велике значення має створення сприятливих, а іноді навіть і комфортних умов для працівників, зайнятих… Читати ще >
Розробка системи автоматичного регулювання пари при гранулюванні кормів (реферат, курсова, диплом, контрольна)
Зміст
Вступ
1. Розробити функціональну схему автоматизації процесу з поданням основної системи регулювання та систем контролю, захисту та обліку
2. Побудувати функціональну схему системи автоматичного регулювання
3. Визначити передаточні функції елементів системи
4. Побудувати структурно-алгоритмічну схему САУ
5. Визначити передаточні функції САУ: розімкнутої системи: замкнутої системи за заданою дією, за збуренням, за похибкою
6. Побудувати ЛЧХ системи та визначити Кр управляючого елемента, який забезпечує 10−20 дБ запасу стійкості по амплітуді системи
7. Побудувати (методом трапецій або іншим) перехідний процес САУ та визначити показники якості
8. Визначити середнє квадратичне відхилення на виході системи Висновок Список літератури
Вступ
У сільському господарстві автоматизація технологічних процесів набула розвитку тільки з 60-х років нинішнього століття. Цьому сприяли успіхи в комплексній механізації та електрифікації сільськогосподарського виробництва. Спочатку автоматизація була лише частковою, тобто автоматизували лише окремі виробничі процеси та установки. Згодом почали створювати системи комплексної автоматизації, за яких автоматизувалися не тільки основні, а й допоміжні виробничі процеси і операції. Виникли автоматизовані потокові лінії, а також виробничі об'єкти: птахофабрики, тваринницькі комплекси, кормоцехи, теплиці й тепличні комбінати, зерноочисні і зерноочисно-сушильні пункти.
На даний час в системі АПК автоматизовано велику кількість установок водопостачання і зрошення, високопродуктивних агрегатів для сушіння і сортування зерна, потокових ліній, цехів і заводів приготування кормів, великих птахофабрик, комплексів промислового типу з відгодівлі великої рогатої худоби, підприємств з переробки сільськогосподарської продукції.
Слід зазначити, що мета автоматизації не обмежується лише зниженням затрат праці і підвищенням ефективності використання техніки. Вона сприяє створенню енергозберігаючих і ресурсозберігаючих технологій, а також підвищенню продуктивності тварин і птиці, урожайності сільськогосподарських культур. Велике значення має створення сприятливих, а іноді навіть і комфортних умов для працівників, зайнятих в автоматизованому виробництві.
Основні переваги автоматизації полягають у можливостях забезпечити:
— зростання продуктивності та поліпшення умов праці;
— виконання робіт у важкодоступних чи взагалі недоступних для людини ділянках (радіоактивні зони, космос, окремі види металургійного та гірничого виробництва);
— підвищення точності, якості технологічних процесів і відповідних виробів;
— зростання надійності та техніко-економічних показників і загальної культури виробництва та кваліфікації обслуговуючого персоналу.
Сучасні системи керування технологічними процесами характеризуються великою кількістю і різноманітністю технологічних параметрів, систем управління (регулювання) і об'єктів управління.
1. Розробка функціональної схеми автоматизації процесу з регулювання основної системи регулювання та контролю
Функціональні системи автоматизації є кресленням на яких умовними позначеннями показують типологічне обладнання разом з трубопроводами контрольний Технологічні обладнання на функціональних схемах автоматизації зображують спрощення без дійсної конфігурації після збереження технологічного обладнання для регулювання і контролю параметрів. вимірювальні прилади та засоби автоматизації з допомогою умовних графічних збережень та літературних збережень. Так усі датчики і вторинні прилади показують на схемах діаметром 10 мм. Виконавчі механізми зображують колом діаметр якого становить 5 мм, двома трикутниками що стикаються, а прилади що розміщуються на щиті керування на відміну від тебе що встановлені безпосередньо на технологічному обладнанні.
Тому їх позначають умовними літерами позначень. З цією метою використовують великі літери латинського алфавіту.
Рис. 1. Функціонально-технологічна схема
2. Побудувати функціональну схему систем автоматичного регулювання
Функціональною схемою САР називається схема, на якій зображенні функціональні елементи системи та зв’язки між ними. Функціональні елементи на схемі позначають у вигляді прямокутників, всередині яких великими буквами скорочено пишуть назву елемента. Зв’язки між елементами показують лініями, а їх напрямки — стрілками. Функціональна схема подає систему автоматичного регулювання у вигляді складових частин, розділених за функціональним призначенням. У загальному випадку функціональна схема САР складається з таких основних функціональних елементів: сприймаючого елементу (СЕ), елемента порівняння, підсилювального елементу (ПЕ) виконавчого механізму (ВМ) та об'єкту управління (ОУ). Крім функціональних елементів та зв’язків між ними, на схемі великими буквами над елементами вказують конкретні пристрої, які виконують відповідні функції в системі, а також конкретні фізичні величини на вході і виході кожного функціонального елемента. Загалом функціональна схема показує не тільки складові елементи системи та зв’язки між ними, але і процес перетворення й передачі сигналів в замкнутій системі автоматичного керування Для по функціональної схеми необхідно зобразити всі функціональні елементи САР. У відповідності до призначення кожного елементу показати його зв’язки з іншими елементами САР, напрямок кожного зв’язку показати стрілкою. Нанести на схему позначення регульованого параметра, на який спрямована мета керування, а також вхідних та вихідних сигналів функціональних елементів. Користуючись спеціальною та довідковою літературою вибрати конкретні прилади для реалізації функціональних елементів системи та вказати їх великими буквами над відповідними елементами схеми.
ПЕ Іо(t) ?I (t) ?I*(t) U (t) б (t) Q (t) I (t) I*(t)
Рис. 2.1 Функціональна схема САР подаючої суміші в гранулятор ОПК-2П
CЕ — сприймаючий елемент УЕ — управляючий елемент ВМ — виконавчий механізм ЖП — живильний пристрій ОК — об'єкт керування ПЕпідсилювальний елемент
3. Bизначення передаточної функції елемента системи
Передаточною функцією елемента називається відношення Лапласових зображень його вихідної величини до вхідної при нульових початкових умовах. Аналіз елементів системи автоматичного регулювання слід починати з передаточних функцій елементів системи.
Аналізуючи як проходить заданий технологічний процес і співставляючи задані параметри функціональних елементів з параметрами передаточних функцій елементарних ланок визначаємо передаточні функції елементів заданої системи.
Усі елементи автоматичних систем автоматичного регулювання в динамічних режимах описуються диференціальними рівняннями. Для визначення їх передаточних функцій необхідно перейти від диференціальних рівнянь до зображень використовуючи математичний метод, який одержав назву перетворення Лапласа. Перетворення Лапласа дає можливість виконати алгебраізацію диференціальних рівнянь, тобто операції диференціювання і інтегрування замінити алгебраїчними операціями множення і ділення. Це дає можливість знайти характеристичне рівняння елементів САР з якого і визначають передаточні функції
Передаточні функції елементів даної схеми.
Датчик струму W1(p)= =
Прегулятор W2(p)=Kp=1 (умовно приймаємо) Виконавчий механізм WЗ(p)=
Об'єкт управління:
По керуванню
Wn(p)=
По збуренню
Wf(p)=
Живильник з приводом
Wж (p)=
Таким чином ми бачимо, що П — регулятор, виконавчий механізм, датчик струму являються без інерційними ланками, а всі інші інерційні ланки першого порядку.
4. Побудувати структурно-алгоритмічну схему САУ
Структурна алгоритмічна схема містить систематичний опис систем.
Структурну алгоритмічну схему складають користуючись функціональною схемою, якщо знайдені передаточні функції окремих елементів системи їх записують у відповідні прямокутники.
F Іо І
Рис. 4.1 Структурно алгоритмічна схема САР подаючої суміші в гранулятор ОПК-2П
5. Визначити передаточні функції САУ: розімкнутої системи за заданою дією, за збудженням, за похибкою
Для визначення еквівалентних передаточних функцій з'єднань ланок використовують такі формули:
— для послідовно з'єднаних ланок
Рис. 5.1
; (5.1)
— для паралельно з'єднаних ланок
Рис. 5.2
; (5.2)
— для з'єднання з від'ємним зворотним зв’язком
Рис. 5.3
(5.3)
Передаточна функція розімкнутої системи:
W (p)=W1(p)•W2(p)•W3(p)•W4(p) •W5(p)=
==
;
Передаточна функція замкнутої системи відносно заданої дії І0:
W3(p)==
Передаточна функція замкнутої системи відносно збурювальної дії f ;
Wf(p)=
Передаточна функція замкнутої системи відносно похибки? I:
W?=
=
6. Побудова ЛЧХ системи та визначення Кр управляючого елемента, який забезпечує 10 — 20 дб запасу стійкості по амплітуді системи
Логарифмічні частотні характеристики системи будують на основі частотної передаточної функції в розімкнутому стані записаної в показниковій формі
W (jw) = A (w) ejц(w)
де A (w) — амплітуда ц (w) — аргумент функції.
A (w) = A1(w) A2(w) A3(w) A4(w) A5(w)
ц (w) = ц1(w)+ ц2(w)+ ц3(w)+ ц4(w)+ ц5(w)
де A1(w) A2(w) A3(w) A4(w) A5(w) — амплітуди функцій елементарних ланок;
ц1(w), ц2(w), ц3(w). ц4(w), ц5(w) — аргументи функцій елементарних ланок.
ЛАЧХ системи визначається за виразом
L (w) = 20log A (w)
Використовуючи передаточну функцію розімкнутої системи і прикладну програму Mathcad будуємо ЛЧХ системи.
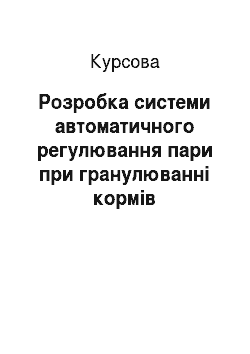
Згідно завдання запас стійкості по амплітуді повинен бути в межах 10 — 20 дб, то потрібно ЛАЧХ L (w) підняти вверх на 12 дб і отримаємо ЛАЧХ L1(w) при якій запас стійкості буде становити 14 дб.
Для цієї ЛАЧХ визначаємо значення Кр за виразом
3.64 Кр = 20
Кр = 20/3.64 = 5.49 451
автоматизація облік контроль гранулювання Рис. 6.1 Логарифмічна амплітудно-частотна характеристика (L (w)) і логарифмічна фазо-частотна характеристика (f (w)) САР подаючої суміші в гранулятор ОПК-2П
7. Побудова перехідного процесу САУ та визначення показників якості
Криву перехідного процесу будуємо використовуючи передаточну функцію замкнутої системи відносно керуючої дії з врахуванням нового значення Кр. Для побудови перехідного процесу застосовуємо прикладну програму MATLAB:
Рис. 7.1 Графік перехідного процесу На основі кривої перехідного процесу рис. 7.1 можна визначити такі показники якості:
— час регулювання tр=65 с.
— коливальність n = 0
— перегулювання:
де h1 — усталене значення регульованої величини;
hmax — максимальне значення регульованої величини
8. Визначити середнє квадратичне відхилення на виході системи, якщо збудження має спектральну густину.
S ()=
Wf(p)=;
2=
Використовуючи програму TAU 8 одержуємо:
==
Висновок
В даній курсовій роботі проведено розрахунок системи автоматичного регулювання пари при гранулюванні кормів.
Система автоматичного регулювання оцінюється за стійкістю та якістю перехідного процесу.
Стійкість системи оцінюється за логарифмічними амплітудною і фазовою характеристиками розімкнутої системи. Розглянута САР пари при гранулюванні кормів забезпечує запас стійкості за амплітудою ДL = 15 дБ;
На основі побудованого перехідного процесу для заданої системи автоматичного регулювання визначено такі показники якості:
— час регулювання tp = 65 с,
— перерегулювання = 18%;
— коливальність N = 0.
В результаті проведеного синтезу П-регулятора покращені динамічні властивості системи, значно збільшено запас стійкості.
Література
1. Мартиненко И. И. и др. Автоматика и автоматизация производственных процесов. — М.: Агропромиздат, 1985.
2. Бородин И. Ф. и др. Технические средства автоматики. — М.: Агропромиздат, 1991.
3. Зайцев Г. Ф., Костюк В. И., Чинаев П. И. Основы автоматического управления. — К.: Техніка, 1977.
4. Бесекерский В. А. и др. Микропроцесорные системы автоматического управления. — Л.: Машиностроение, 1988.
5. Мартиненко І.І. та інші. Автоматизація технологічних процесів сільськогосподарського виробництва. -К.: Урожай, 1995.
6. Климентовський Ю. А., Гладкий А. М. Технічні засоби автоматики. — К.: КВІЦ, 2003.
7. Имаев Д. Х., Краснопрошина А. А., Яковлев В. Б. Теория автоматического управления. Ч.1. Линейные системы автоматического управления. — К.: Вища школа, 1992.
8. Гладкий А. М., Клендій П.Б. Теоретичні основи автоматики. Методичні вказівки до виконання курсової роботи-К.: Видавничий центр НАУ, 2003.-42с.