Розробка джерела високостабільної напруги з мікропроцесорним керуванням
Перш за все і по черзі і по розробці інших схем (принципової, функціональної, тощо) розробляють — структурну. Структурна схема при синтезі поєднує в собі найбільш важливу інформацію про склад, функції і структуру МПС. На структурній схемі звичайно зображують все в вигляді прямокутників. Вся схема поділена на основні і другорядні складові. Основні структурні вузли МПС показують в вигляді… Читати ще >
Розробка джерела високостабільної напруги з мікропроцесорним керуванням (реферат, курсова, диплом, контрольна)
Курсова робота на тему:
Розробка джерела високої стабільної напруги з мікропроцесорним керуванням
Зміст
- Вступ
- 1 Аналітичний огляд літератури
- 2 Аналіз вихідних даних та розробка структурної схеми
- 3 Розробка функціональної схеми
- 4 Вибір елементної бази
- 5 Розробка, розрахунок та опис принципової схеми
- 6 Розробка програмного забезпечення
- 7 Розрахунок надійності
- 8 Розрахунок потужності споживання
- Інструкція з експлуатації
- Інструкція з експлуатації
- Висновки
- Література
- Вступ
- Останнім часом на ринку техніки відбувається масовий приплив різноманітної автоматизованої апаратури різного призначення і різної складності від телефонної картки до надскладної серверної системи. Це стало можливим завдяки мікроконтролерам. Мікроконтролери застосовуються в усіх сферах нашого життя і вона розширює і збільшує свої можливості щорічно. Те що здавалося нам п’ять років тому нездійсненним зараз цілком можливо завдяки стрімкому розвитку технології виробництва електронних компонентів. Раніше все було розміщене (мікроконтролери) в декількох корпусах і один блок мікроконтролерів займав багато місця на платі. Тому й комп’ютери п’ять років тому були просто величезні. Ну, а що ж тепер, а зараз «все в одному корпусі» і комп’ютери зменшились до розмірів маленької записної книжечки. Раніше працівникові всі ці компоненти було важко розмістити на платі так як їх була сила силенна, а також і розміри плати, а зараз декілька мікросхем і машинна лазерна пайка деталей і крихітний контролер готовий.
- Проблема за проблемою така як якої фірми виробника чипів вибрати продукцію Intel, NVIDIA, Award, Atmel, Microchip… Кожна з них пропонує нескінченну кількість найменувань, а на додачу купу сторінок технічних описів і характеристик і ще англійською мовою, спробуй вибери. Нова елементна база дозволяє створити компактні та економічні прилади, здатні за допомогою персонального комп’ютера записувати в свою пам’ять текст, а потім в автономному режимі зчитувати його.
- На відміну від кількості найменувань мікроконтролерів засоби розробки програмного забезпечення набагато вужче. Найпоширенішим є Assembler, C, Pascal, C++, Delphi, Fortran, Visual Basic… звичайно кожна фірма використовує свою мову програмування чи змішує їх.
- Ці всі зменшення використовуються не лише для потреб людини, а й для спрощення виробничого процесу, ремонту, перевірки тих чи інших пристроїв на працеспроможність чи достовірність вихідних даних. Все ж важко уявити теперішнє життя без всієї електроніки.
- У даному проекті мною буде розроблений пристрій на сучасному мікроконтролері, написана програма і розглянуті інструментальні засоби.
- 1. Аналітичний огляд літератури
- Пристрій що буде розроблено, представляє собою джерело високостабільної напруги з мікропроцесорним керуванням на основі мікроконтролера, який дозволяє стабілізувати довготривале відхилення мереженої напруги більш ніж 10% від номінального значення 220 В.
- Основою джерела високостабільної напруги з мікропроцесорним керуванням є програмований мікроконтролер.
- Особливості мікроконтролера PIC16F84A:
- PIC16CXX — це 8-розрядні мікроконтролери з RISC архітектурою, що виробляється фірмою Microchip Technology. Це сімейство мікроконтролерів відрізняється низькою ціною, низьким енергоспоживанням і високою швидкістю. Дані мікроконтролери мають ЕПЗП (електропрограмувальний запам’ятовуючий пристрій) програм, ОЗП (оперативний запам’ятовуючий пристрій) даних і випускається в корпусах з 18 і 28 виводами. Даний пристрій — однократно програмується користувачем і призначені для пристроїв, в яких не буде проходити подальше зміна коду, які повністю протестовані і завершені. Ці контролери випускаються в пластикових із заздалегідь заданим типом зовнішнього генератора — кварцовим або RC. А ось для виробів, програма яких може змінюватись або містить які-небудь змінні частини, таблиці, параметри калібрування, ключі тощо. То для таких пристроїв випускається контролер PIC16F84A, що електрично стирається і перепрограмується. Саме такий контролер і використовується для MIDI клавіатури. Одним з плюсів цієї мікросхеми є те що вона містить електрично перепрограмувальний ПЗП (постійний запам’ятовуючий пристрій) коду чи даних.
- Далі я починаю детальний опис мікросхеми PIC16F84A з тих особливостей і переваг, які виділяють даний мікроконтролер серед інших. Для застосувань пов’язаних із захистом інформації, кожний PIC має свій біт секретності, який може бути запрограмований для заборони читання програмного коду і ПЗП даних. При програмуванні спочатку записується програмний код, перевіряється на правильність запису, а потім встановлюється біт секретності. Якщо спробувати прочитати дані з мікросхеми з встановленим бітом секретності, для PIC16F84A — 7 старших розрядів читатимуться як нулі, а 7 молодших розрядів представлятимуть зашифровані 14 розрядів команди. ПЗП даних PIC16F84A що електрично перепрограмується, при встановленому біті захисту не може бути зчитаний.
- Такий контролер в собі має дуже ефективну систему команд, яка складається з 35 інструкцій. Всі інструкції виконуються за один цикл, за винятком умовних переходів і команд що змінюють програмний лічильник, які виконуються за 2 цикли. Таким чином один цикл виконання інструкції складається з 4-х періодів тактової частоти. Отже, при частоті 4 Мгц, час виконання інструкції складає 1 мкс, а команди переходу всього за 2 мкс. Кожна інструкція складається з 14-и біт що діляться на код операції і операнд. Високій швидкодії цей контролер завдячує вдалій організації виконання команд в PIC досягається за рахунок використання двошинної архітектури замість традиційної одно шинної. Двошинна (Гарвардська) архітектура на відміну від одношинної (Фон-Неймановської) ґрунтується на наборі регістрів з розділеними шинами і адресним простором для команд і для даних. Набір регістрів означає, що всі програмні об'єкти, такі як порти введення-виведення, елементи пам’яті і таймер, є фізично реалізованими апаратними регістрами. Звичайно, Гарвардська архітектура і велика розрядність команди дозволяють зробити код для PIC більш компактним, ніж для інших мікроконтролерів й істотно підвищити швидкість виконання програм. Що до набору регістрів PIC-а то я привів його нижче.
- Звичайно всі програмні об'єкти, з якими може працювати PIC, є фізичними регістрами. Тому щоб зрозуміти як працює PIC, потрібно спробувати розібратися з тим, які регістри у нього існують і як з кожним з них працювати. Набір регістрів PIC16F84A складається з:
- — регістра непрямої адресації (f0);
- — регістра таймера/лічильника (f1);
- — регістра програмного лічильника (f2);
- — регістра слова стану (f3);
- — регістра вибору (f4);
- — регістрів введення-виведення (f5,f6);
- — регістрів ЕППЗП EEDATA, EEADR (f8,f9);
- — регістри загального призначення, спеціальних регістрів W, INTCON, OPTION.
- Нижче я приведу основні особливості мікроконтролера PIC16F84A:
- — скидання при включенні живлення (POR);
- — скидання по падінню напруги живлення;
- — програмування через послідовний порт (ICSPT) (з використанням 2-х виводів);
- — режим економії електроенергії при простої;
- — можлива зміна режиму роботи тактового генератора;
- — сторожовий таймер (WDT) з власним вбудованим RC-генератором (для підвищення надійності роботи);
- — програмний захист коду;
- — таймер ввімкнення живлення (PWRT) і таймер запуску основного генератора (OST).
- 2 Аналіз вихідних даних та розробка структурної схеми
- Проаналізуємо вихідні дані схеми, які є такими:
- — вихідна частота 50 Гц при вхідній в 50 Гц;
- — діапазон вхідної напруги яка стабілізується 145 — 275 В;
- — час переключення обмоток автотрансформатора — мікропроцесором не більше 40 мс.;
- Перш за все і по черзі і по розробці інших схем (принципової, функціональної, тощо) розробляють — структурну. Структурна схема при синтезі поєднує в собі найбільш важливу інформацію про склад, функції і структуру МПС. На структурній схемі звичайно зображують все в вигляді прямокутників. Вся схема поділена на основні і другорядні складові. Основні структурні вузли МПС показують в вигляді прямокутників і основні взаємозв'язки між ними. Другорядні - функціональні частини на структурних схемах звичайно не показують (наприклад, блок живлення), а якщо потрібно показати то лінії взаємозв'язку з основними функціональними частинами — зображають пунктиром. Якщо нам потрібно вивчити принцип роботи МПС нам необов’язково потрібно аналізувати величезну принципову схему. Ми можемо проаналізувати структурну схему яка значно менше і по ній можна швидко одержати уяву про склад, структуру і виконувані ним функції, не звертаючи уваги на схемну реалізацію його функціональних частин.
- В даному випадку до складу стабілізатора такі основні блоки: автотрансформатор, блок узгодження рівнів напруг, блок індикації, мікропроцесор, генератор, блок гальванічної розв’язки, блок перетворення напруги. Структурна схема джерела високо стабільної напруги з мікропроцесорним керуванням приведена на рисунку № 1
- Рисунок 1 — Структурна схема джерела високостабільної напруги з мікропроцесорним керуванням.
- 3. Розробка функціональної схеми
- Як правило в основі функціональної схеми лежить структурна схема. Слідуючи з вищесказаного функціональна схема являє собою дещо ускладнену схему електричного пристрою.
- Графічне зображення функціональної схеми дає найбільш наглядне уявлення про послідовність взаємодії функціональних частин МПС.
- На даному стабілізаторі мережевої напруги з мікропроцесорним керуванням входять такі основні елементи:
- Вхідний пристрій — призначений для утворення великого вхідного опору для більш надійної роботи пристрою.
- Автотрансформатор — призначений для ступінчастої корекції напруги.
- Мікропроцесор — мікросхема PIC16F84A, яка є головним пристроєм і виконує роль керуючого елементу.
- Стабілізатор частоти — елемент функціональної схеми, в якому основою є кварцовий резонатор і конденсатори. Цей елемент виконує функцію стабілізації зразкової частоти мікропроцесора.
- Блок індикації - містить в собі 8 світло діодів різного кольору, що призначені для відображення результату роботи.
- 4. Вибір елементної бази
- Після розробки функціональної схеми з’являється можливість вибору елементної бази МПС. В першу чергу необхідно вирішити, які функціональні частини можуть бути побудовані на інтегральних мікросхемах (ІМС), а які побудовані на дискретних. Таким чином, для побудови такого електронного пристрою, як випрямляч напруги з мікропроцесорним керуванням, використовуємо наступні елементи:
- — мікроконтролер PIC16F84А:
- В мікроконтролері використовується прогресивна RISC (KMOH) архітектура. В ньому збільшено розмір ядра та кількість внутрішніх та зовнішніх переривань.
- Характеристики високопродуктивного RISC-процесора, що є основою контролера:
- усього 35 простих для вивчення інструкцій;
- всі інструкції виконуються за один такт (200 нс), крім інструкції переходу, які виконуються за два такти (розгалуження);
- швидкість роботи: тактова частота до 20МГц мінімальна тривалість такту 200 нс;
- пам’ять програми: 1024 слова;
- пам’ять ЕСППЗП: 64 байт;
- пам’ять даних ОЗП: 68 байт;
- 8 бітні дані;
- 14 бітні команди;
- — 15 апаратних регістрів спеціального призначення;
- 8-рівневий апаратний стек;
- прямий, непрямий та відносний режими адресації для даних та інструкцій;
- чотири джерела переривання;
- зовнішній вхід RB0/INT;
- переповнення таймера TMR0;
- переривання при зміні сигналів на лінії порту В (PORTB) — по закінченню запису даних в ЕСППЗП (EEPROM);
- 1000 циклів запису/стирання FLASH пам’яті програми;
- 1 000 000 циклів запису/стирання пам’яті даних ЕСППЗП. Приведемо периферійні характеристики контролера:
- 13 ліній вводу/виводу з індивідуальним контролем напрямку;
- високоточні схеми для безпосереднього керування світлодіодними індикаторами: (25 мА макс. струм витоку, 25 мА макс. струм стоку);
- timer0: 8-розрядний таймер/лічильник з 8-розрядним програмованим попереднім дільником.
- Технологія КМОН контролера:
- економічна, високошвидкісна технологія КМОН ЕППЗП/ЭСППЗП;
- широкий робочий діапазон напруг живлення — від 2,0 В до 5,5В;
- низьке споживання енергії:
- < 2мА при 5 В, 4МГц;
- 15мкА при 2 В, 32кГц;
- < 0,5мкА в режимі STANDBY при 2 В.
- Рисунок 4 — УГЗ мікроконтролера РІС 16F84А
- На рисунку 4 в УГЗ мікроконтролера PIC16F84 є такі позначення:
- — RA0 — RA4 — двонаправлений порт А;
- — RB0 — RB7 — двонаправлений порт В;
- — OSC1/CLKIN — вхідна синхронізація;
- — OSC2/CLKOUT — вихідна синхронізація.
- Основні технічні характеристики мікросхеми PIC16F84А приведені в таблиці 1.
- Таблиця 1 — Характеристики мікроконтролера PIC16F84А
- Перелік параметрів приладів які входять до складу стабілізатора:
- постійні резистори типу МЛТ потужністю 0,125 Вт і опором 160 кОм (R1), 22 кОм (R3), 20 кОм (R5), 300 Ом (R6-R12), 510 Ом (R13-R21);
- підстроечні резистори потужністю 0,5 Вт і опором 15 кОм (R2), 22 кОм (R4);
- конденсатори неполярні керамічні С1 ємністю 2 мкФ і напругою 750 В, С3 ємністю 0,1 мкФ і напругою 16 В, С4, С5 ємністю 20 мкФ;
- конденсатори полярні керамічні С2 ємністю 10 000 мкФ і напругою 16 В, С6 ємністю 1 мкФ і U — 16 В, С7 ємністю 200 мкФ і напругою 25 В;
- кварцовий резонатор з частотою 4 МГц;
- В даному випрямлячі ми застосовуємо випрямні діоди: VD1 — Д814 В Uстаб. — 10 В при Iстаб. 5 мА, Rдиф. при 0 0С — 12 Ом, Uпост.пр. — 1 В при Iпр. 50 мА, Iпост.звор. — 0,1 мкА при Uзвор. — 1 В; VD3 — Д815А Uстаб.номин. — 56 В при Iстаб.номин. 50 мА, Rдиф. при 0 0С — 0,6 Ом; VD4-КД243А Iмах.пр.ср. — 10 А, Uзвор.мах.— 300 В, Uпост.сер.— 1,2 В, Iпост.звор. — 3 мА при Uзвор.мах. ;VD2, VD5 — VD10 — КЦ407А Iсер.вип. 500 мА, Iсер.вип.імп. 3 А, Uзвор.— 400 В, Iзвор.- 5 мкА при Uзвор.— 400 В;
Характеристики | Значення | |
Температура навколишнього середовища, °С | — 55…+125 | |
Температура зберігання, °С | — 65…+150 | |
Напруга на VDD відносно VSS, В | — 0,3… 7,5 | |
Напруга на MCLR відносно VSS, мА | 0,6. 14 | |
Максимальний струм лінії VSS, мА | ||
Максимальний струм лінії VDD, мА | ||
Потужність споживання, мВт | ||
HL1-HL8 — світло діоди АЛ307БМ виконують роль блоку індикації Їх основні параметри приведені в таблиці 2.
Таблиця 2 — Параметри світлодіодів АЛ307БМ
Параметри | Значення | |
Колір свічення | червоний | |
Прямий струм, мА | ||
Максимальна пряма напруга, В | 2 (1,8−2,2) | |
Максимальна зворотна напруга, В | ||
Максимальний прямий струм, мА | ||
Максимальний імпульсний прямий струм, мА | ||
Тривалість імпульсу, мс | ||
сімістори VS1 — VS6 КУ208Г параметри яких — Uпост.пр.— 400 В, Iпост.пр. — 0,5 А, Iімп.пр. — 1 А;
автотрансформатор ТС-180−2 має можливість живити навантаження потужністю до 1 кВт;
оптопари слугують для гальванічної розв’язки різних кіл U1 — U6 АОУ103Б параметри яких — Uвих.кола не менше 200 В, Uзвор.вих.— не менше 200 В, Iвкл.- 10 мкА, Uвх.кола не менше 5 В, tвкл. — 15 мкс, tвикл. — 100 мкс;
— стабілізатор напруги з фіксованою вихідною напругою — це мікросхема (мостова) КР142ЕН5А. Основні її характеристики приведені в таблиці 3.
Таблиця 3 — Характеристики мікросхеми КР142ЕН5А
Характеристики | Значення | |
Вихідна напруга, В | ||
Мінімальна вихідна напруга, В | 4,9 | |
Максимальна вихідна напруга, В | 5,1 | |
Максимальна нестабільність по напрузі, %/В | 0,05 | |
Максимальна нестабільність по струму, %/А | 1,33 | |
Максимальний температурний коефіцієнт напруги, %/°С | 0,02 | |
Максимальний струм споживання, мА | ||
Гранично допустимі режими: — мінімальна вхідна напруга, В — максимальна вихідна напруга, В — максимальна вихідний струм, А. | 7,5 1,5 | |
5. Розробка, розрахунок та опис принципової схеми Розробка принципової схеми виконується на етапі проектування і представляє собою вищий рівень розробки електронних пристроїв, ніж рівень розробки структурної і функціональної схем.
Принципова схема синтезується на основі функціональної схеми та аналізу вимог технічного засобу, а також вимог, що висуваються розробником до кожного функціонального елемента.
Принципова схема є основою для розробки інших конструкторських документів, наприклад, схем з'єднань (монтажних) і креслень. Користуються ними звичайно для вивчення принципів роботи МПС, а також при наладці, контролі і ремонті апаратури.
Розробка принципової схеми полягає у виборі однієї з відомих схем, яка найбільш повно відповідає сукупності техніко-економічних вимог при максимальній її простоті і надійності.
Розрахунок елементів принципової схеми ведеться до розрахунку номіналів резисторів, конденсаторів, діодів, оптопар, мікроконтролерів, які входять до складу принципової схеми. В даному випадку номінали резисторів, конденсаторів, діодів, оптопар, мікроконтролерів, величини їх опорів і потужностей споживання та ємностей приведені в розділі «Вибір елементної бази» .
В описі принципової схеми описується принцип дії розробленого пристрою за схемою електричною принциповою.
Як видно з функціональної схеми основний елемент стабілізатора напруги — мікроконтролер PIC16F84А, який здійснює вимір мережевої напруги, яка потрапляє на вхід приладу, іде опрацювання отриманих значень і вивід результатів вимірювання на «табло» яке складається з світло діодів. Значення виміряної і випрямленої мережевої напруги виводиться на вісім світло діодів HL1-HL8 при чому на HL1- HL3 виводиться значення «Високої», «Нормальної», «Низької» напруги. Світло діоди HL4- HL8 відіграють роль вказівника рівня відсоткового відхилення напруги від 220 В. При чому, якщо, наприклад напруга в мережі 270 В то вона знаходиться в діапазоні від 265 до 275 В який передбачений схемою то горить світло діод HL4 («-15%») і блимає HL1 («Високе») попереджаючи що напруга небезпечна для звичайних приладів.
Отже перейдемо до самої роботи приладу і принципу виміру і випрямлення мережевої напруги. Принципова схема приладу показана на рисунку 1 в розділі «Аналітичний огляд літератури». По записаній в пам’ять програмі МК DD1 виконує виміри мережевої напруги в кожному періоді (20мс). З дільника R1R2 від'ємні на півхвилі мережевої напруги, проходячи через стабілітрон VD1, формує на ньому імпульси з амплітудою, визначаємою напругою стабілізації, в даному випадку 10 В. З дільника R3R4, зменшуючи амплітуду отриманого сигналу від ТТЛ рівня, ці імпульси приходять на лінію 0 порта А, налаштований на вивід. З допомогою підстроечного резистора R4 нижній рівень сигналу на виході МК встановлений на 0,2…0,3 В нижче рівня логічного нуля.
Як видно з рисунка 5 при зміні мережевої напруги від 145 до 275 В довжина імпульсів, відповідних до логічного нуля, змінюється приблизно від 0,5 до 6 мс. Вимірюючи довжину цих імпульсів, програма МК вираховує рівень мережевої напруги в протікаю чому періоді.
Після ввімкнення стабілізатора мережева напруга контролюється під час 5 с. Якщо вона знаходиться в діапазоні від 145 до 275 В, блимає зелений світло діод HL2 «Нормальное», в інших випадках загоряється світлодіод HL3 «Низька» чи HL1 «Високе» (в залежності від значення мережевої напруги). В такому стані стабілізатор знаходиться до тих пір, доки напруга в мережі не ввійде в задані рамки.
Після того як пройшло 5 с і напруга в мережі залишається в допустимих рамках, МК видає команду на відкриття симистора VS1, через який автотрансформатор підключається до мережі. Після того МК ще по проходженні 0,5 с виконує контрольні заміри мережевої напруги, а потім, в залежності від результату виміру відкриває один з семисторів VS2 — VS6, тим самим підключаючи навантаження на один з п’яти виводів автотрансформатора. Гальванічна розв’язка семистора з МК виконується тиристорними оптопарами U1-U6.
При відхиленні мережевої напруги за допустимі рамки автотрансформатор разом з навантаженням відключається симистором VS1. Світлодіоди HL1 — HL8 індикують стан стабілізатора і рівень напруги в мережі.
В залежності від величини мережевої напруги U виводи додаткових обмоток автотрансформатора переключаються в залежності від рівня напруги в мережі. Якщо U<145 В і U>275 В — то навантаження відключене від мережі, напруга знаходиться в діапазоні від 145 до 275 В то горить відповідний світлодіод при підключеному навантаженні.
Для попередження хаотичного переключення семисторів на випадок, якщо мережева напруга знаходиться на порозі переключення виводів автотрансформатора, в програму введений деякий «гістерезис» в спрацюванні. Наприклад якщо при збільшенні мережевої напруги від 189 до 190 В буде виконано переключення навантаження з виводу «+20%» на «+10%», і зворотно на «+20%» МК переключить навантаження тільки тоді, коли мережева напруга знизиться приблизно до 187 В. Затримка між зміною напруги в мережі і відповідним переключенням виводів автотрансформатора не перевищує 40 мс.
При «провале» мережевої напруги нижче 145 В на час більше 100 мс («мож-но изменять, см. комментарии в исход-ном тексте программы») МК відключає автотрансформатор з підключеною до нього навантаження від мережі, при цьому гасне зелений світлодіод HL2 «Нормальное» і загоряется червоний світлодіод HL3 «Низкое». В випадку, если напруга в мережі піднялась вище 275 В, контрольоване навантаження буде відключене від мережі через 40 мс и загориться червоний світлодіод HL1 «Високое» .
Пося того як напруга в мережі повернеться до норми (145
6. Розробка програмного забезпечення При розробці і налагодженні програми була використана безкоштовна програма Mplab надана фірмою Microchip.
MPLAB — це інтегроване середовище розробки (IDE) для сімейства мікроконтролерів PiCmicro фірми Microchip Technology Incorporated. MPLAB дозволяє писати, налагоджувати й оптимізувати програми для ваших розробок. MPLAB включає текстовий редактор, стимулятор (віртуальний відладник), менеджер проектів і підтримує емулятори (внутрішньосхемні відладники) MPLAB-ICE і PICMASTER, програматори PICSTART Plus і PRO МАТЕ II й інші засоби й інструменти розробок фірми Microchip і Інших фірм.
Інструментальні засоби MPLAB, організовані як спадаючі меню й обумовлені швидкі клавіші, дозволяють: — асемблеру вати, компілювати вихідний текст; - налагоджувати логіку роботи, спостерігаючи за допомогою емулятори чи, у реальному часі, з емулятором MPLAB-ICE ;- переглядати перемінні у вікнах перегляду;- програмувати кристали за допомогою програматорів PICSTART Plus чи PRO MATE IIі багато чого іншого.
MPLAB працює під Microsoft Windows 3.1х, Windows 95, 98, NT, 2000 (починаючи з версії 5.00.00). Правда не все додаткове устаткування, таке як внутрішньосхемні емулятори і програматори буде функціонувати під всіма операційними системами. Для більш докладного опису звертайтеся до спеціалізованої літератури і технічних описів фірми Microchip.
Опис програми можна знайти на Інтернет сайті фірми Microchip
Ще я хотів додати що вихідний текст програми ще можна знайти на ftp-сервері редакції журналу РАДИО в Інтернеті по адресі ftp://ftp.radio.ru/pub/2002/08/stab чи в журналі Радио за 2002/8 Hex версію, але все ж таки прошивати треба оригінальною програмою — MPLAB для більшої впевненості в правильності однократного запису даних на чіп.
Програма для налаштування контролера написана на мові Асемблер.
Программа работы микроконтроллера в стабилизаторе напряжения. Версия 1.0
LIST P=16F84
;Конфігурація приладу
CONSTANT U165=.111; Константи які визначають кордон мережевої напруги
CONSTANT U195=.148; переключення виводів автотрансформатора.
CONSTANT U210=.162
CONSTANT U230=.179
CONSTANT U245=.190
CONSTANT U260=.198
CONSTANT U275=.204
CONSTANT POWER_ON=.128; Час тестування мережі при стандартнову ввімкненні (5 сек.)
CONSTANT PWON_ERL=.250; Час тестування мережі після сбою живлення
CONSTANT PWON_ERH=.1;Дозвіл ввімкнення навантаження (10с)
CONSTANT CONFIG=.0 ;Алгоритм работи 0-без UPS, 1-сумісно з UPS
;************************************************************
;Опис використовуемих ресурсів мікроконтролера
RTCC EQU 0×01
TRISA EQU 0×85
TRISB EQU 0×86
STATUS EQU 3
RP0 EQU 5
PORTA EQU 0×05
PORTB EQU 0×06
OPTIONS EQU 0×81
INTCON EQU 0x0B
C equ 0
Z equ 2
TEMP EQU 0x0C
T_OFF EQU 0x0D
T_ONL EQU 0x0E
T_ONH EQU 0x0F
TS1 EQU 0×10
TS2 EQU 0×11
TS3 EQU 0×12
FLAGS EQU 0×13
REZ_U EQU 0×14
REZ_U2 EQU 0×15
OLD_U EQU 0×16
;Початкова індикація контролера і програми
BSF STATUS, RP0; Встановлюємо сторінку памяті 1
MOVLW B'1'; Налагоджуємо розряд 0 порта A на ввод, для виміру U.
MOVWF TRISA
MOVLW B'10 000 000'
MOVWF TRISB; Налагоджуємо розряд 7 порта В на ввод, для підключення кнопки.
MOVLW B'11 000 100'; Подключаем определитель до таймеру і встановлюємо коефіцієнт деления 1:32
MOVWF OPTIONS; Сигнал на таймер від внутрішнього генератора
BCF STATUS, RP0; Встановлюємо сторінку памяти 0
CLRF PORTA
CLRF PORTB
BTFSC STATUS, 4
GOTO L50
L51 BSF PORTB,; Виникло скидання від WDT через зависания контролера
BCF PORTB, 5;Сигналізуем, і блокуємо подальшу работу до натиснення кнопки
BSF PORTB, 4
BCF PORTA, 2;Команда на закриття симмисторов
BCF PORTA, 3
BCF PORTB, 0
BCF PORTB, 1
BCF PORTB, 2
BCF PORTB, 3
BTFSS PORTB, 7
GOTO L51
L50 CLRF INTCON
BCF PORTB, 5
BSF PORTB, 6
BSF PORTB, 4
MOVLW .250;Затримка 0.5с поки живлення після включення прийде в норму
MOVWF T_OFF
L29 CLRF RTCC
BCF PORTA, 2; Команда на закриття симмисторов
BCF PORTA, 3
BCF PORTB, 0
BCF PORTB, 1
BCF PORTB, 2
BCF PORTB, 3
L28 CLRWDT
MOVF RTCC, 0
SUBLW .250
BTFSC STATUS, C
GOTO L28
DECFSZ T_OFF
GOTO L29
CALL LEVEL_U
CALL LEVEL_U
CALL LEVEL_U
BCF FLAGS, 1
MOVLW .1
SUBLW CONFIG
BTFSC STATUS, Z
BSF FLAGS, 1 ;Работа стабилизатора сумісного з UPS
MOVLW .1;Перед включенням навантаження через 10с контролюємо напругу в мережі.
MOVWF T_ONH
MOVLW POWER_ON
MOVWF T_ONL
BSF FLAGS, 0
BCF PORTB, 6
BCF PORTB, 4
BSF PORTB, 5
GOTO L22
;Початок основного робочого циклу контролю і стабілізації напруги.
L5 BSF STATUS, RP0; Встановлюєм сторінку памяти 1 (Для перешкодостійкості)
MOVLW B'11 000 100';Подключаемо определитель до таймера і встановлюємо коефіцієнт деления 1:32.
MOVWF OPTIONS; Сигнал на таймер от внутрішнього генератора
BCF STATUS, RP0; Встановлюємо сторінку памяти 1
BCF FLAGS, 0
BSF PORTB, 5
MOVF REZ_U, 0; зберігаємо результат попереднього виміру
MOVWF OLD_U
L19 CALL LEVEL_U; Визиваємо процедуру виміру напруги
MOVWF REZ_U
CALL LEVEL_U ;Визиваємо процедуру виміру напруги повторно
SUBWF REZ_U, 0;Зрівнюємо виміри
BTFSS STATUS, Z
GOTO L19; Повторюємо, поки результати не будуть однаковими
BTFSS PORTB, 7; Якщо натиснена кнопка то необхідно відключити навантаження
GOTO L40
BCF PORTB, 5
L47 MOVLW .200; Для відключення навантаження необхідно утримувати кнопку приблизно 2 сек.
MOVWF TEMP
L46 CLRF RTCC
L45 CLRWDT
BTFSS PORTB, 7
GOTO L40
MOVF RTCC, 0
SUBLW .250
BTFSC STATUS, C
GOTO L45
DECFSZ TEMP, 1
GOTO L46
BCF FLAGS, 0
GOTO L20; Необхідно відключити навантаження, переходимо на іншу гілку алгоритму
L40 BCF PORTA, 2; Команда на закриття симмисторов
BCF PORTA, 3
BCF PORTB, 0
BCF PORTB, 1
BCF PORTB, 2
BCF PORTB, 3
BSF PORTB, 5
MOVF REZ_U, 0;Зрівнюєм результат останнього виміру з результатом полученим
SUBWF OLD_U, 0; останньому циклі
BTFSC STATUS, Z
GOTO U0; перекоммутація симмисторов не потребуется
CLRF RTCC; Пауза 1мс, для завершення запирання симисторов
L17 CLRWDT
MOVF RTCC, 0
SUBLW .20
BTFSC STATUS, C
GOTO L17
;Аналіз результатів виміру
U0 MOVF REZ_U, 1;U < 145
BTFSS STATUS, Z
GOTO U1
DECFSZ T_OFF, 1; Затримка перед ввімкненням
GOTO L30
MOVLW .10
MOVWF T_OFF
BCF FLAGS, 0
GOTO L20; Необхідно відключити навантаження, переходимо на іншу гілку алгоритму
L30 BSF PORTA, 2
BSF PORTB, 3
GOTO L5
U1 MOVLW.1;145 < U < 165
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U2
MOVLW.7
MOVWF T_OFF
CALL SIGNAL1
BSF PORTA, 2
BSF PORTB, 3
GOTO L5
U2 MOVLW .2;165 < U < 195
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U3
MOVLW .7
MOVWF T_OFF
BCF PORTB, 4
BCF PORTB, 6
BSF PORTA, 2
BSF PORTB, 3
GOTO L5
U3 MOVLW .3;195 < U < 210
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U4
MOVLW.7
MOVWF T_OFF
BCF PORTB, 4
BCF PORTB, 6
BSF PORTA, 2
BSF PORTB, 2
GOTO L5
U4 MOVLW.4;210 < U < 230
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U5
MOVLW.7
MOVWF T_OFF
BCF PORTB, 4
BCF PORTB, 6
BSF PORTA, 2
BSF PORTB, 1
GOTO L5
U5 MOVLW.5;230 < U < 245
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U6
MOVLW.7
MOVWF T_OFF
BCF PORTB, 4
BCF PORTB, 6
BSF PORTA, 2
BSF PORTB, 0
GOTO L5
U6 MOVLW.6;245 < U < 260
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U7
MOVLW.7
MOVWF T_OFF
BCF PORTB, 4
BCF PORTB, 6
BSF PORTA, 2
BSF PORTA, 3
GOTO L5
U7 MOVLW.7 ;260 < U < 275
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U8
MOVLW.7
MOVWF T_OFF
CALL SIGNAL2
BSF PORTA, 2
BSF PORTA, 3
GOTO L5
U8 MOVLW.7
MOVWF T_OFF
BCF FLAGS, 0
GOTO L20;U > 275, Необхідно відключити навантаження
;Цикл контролю напруги при відключеному навантаженню
L20 BCF PORTA, 2; повторно команда на закриття симмисторов (на всякий випадок)
BCF PORTA, 3
BCF PORTB, 0
BCF PORTB, 1
BCF PORTB, 2
BCF PORTB, 3
L21 MOVLW PWON_ERH; Витримка перед дозволом повторного включення після порушення живлення
MOVWF T_ONH
MOVLW PWON_ERL
MOVWF T_ONL
L22 CLRWDT
BSF STATUS, RP0; Встановлюем сторінку памяти 1 (Для перешкодостійкості)
MOVLW B'11 000 100'; Подключаемо определитель до таймера і встановлюємо коєфіціент деления 1:32.
MOVWF OPTIONS; Сигнал на таймер от внутрішнього генератора
BCF STATUS, RP0; Встановлюємо сторінку памяти 1
DECFSZ T_ONL, 1
GOTO L23
DECFSZ T_ONH, 1
GOTO L23
GOTO L25
L23 CALL LEVEL_U; Визиваемо процедуру виміру напруги
MOVWF REZ_U
CALL LEVEL_U; Визиваемо процедуру виміру напруги повторно
SUBWF REZ_U, 0;Зрівнюєм результати
BTFSS STATUS, Z
GOTO L23; Повторюємо, поки результати не будуть однаковими
CALL SIGNAL3
;Аналіз результатів виміру
U20 MOVF REZ_U, 1 ;U < 145
BTFSS STATUS, Z
GOTO U21
BCF PORTB, 4
BCF PORTB, 5
BSF PORTB, 6
GOTO L21; Повторно встановлюємо затримку часу
U21 MOVLW.1;145 < U < 165
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U22
BCF PORTB, 4
BCF PORTB, 5
BSF PORTB, 6
GOTO L21; Повторно встановлюємо затримку часу
CALL SIGNAL1
CALL SIGNAL3
BCF PORTB, 4
GOTO L22
U22 MOVLW .2;165 < U < 195
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U23
BCF PORTB, 4
BCF PORTB, 6
CALL SIGNAL3
GOTO L22
U23 MOVLW.3;195 < U < 210
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U24
BCF PORTB, 4
BCF PORTB, 6
CALL SIGNAL3
GOTO L22
U24 MOVLW .4 ;210 < U < 230
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U25
BCF PORTB, 4
BCF PORTB, 6
CALL SIGNAL3
GOTO L22
U25 MOVLW.5;230 < U < 245
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U26
BCF PORTB, 4
BCF PORTB, 6
CALL SIGNAL3
GOTO L22
U26 MOVLW .6 ;245 < U < 260
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U27
BCF PORTB, 4
BCF PORTB, 6
CALL SIGNAL3
GOTO L22
U27 MOVLW.7;260 < U < 275
SUBWF REZ_U, 0
BTFSS STATUS, Z
GOTO U28
CALL SIGNAL3
CALL SIGNAL2
BCF PORTB, 6
GOTO L22
U28 BSF PORTB, 4
BCF PORTB, 5
BCF PORTB, 6
GOTO L21;U > 275, Повторно встановлюем затримку часу
; Затримку часу причекали, тепер чекаємо натиснення кнопки на перезавантаження
L25 CLRWDT
MOVLW.1;Затримка перед повторним включенням
MOVWF T_ONH
MOVLW.2
MOVWF T_ONL
BSF PORTB, 5
BTFSC FLAGS, 0
GOTO L41; Перехід на включення навантаження, якщо не потрібно чекати натиснення кнопки
BTFSC FLAGS, 1
GOTO L41; Перехід на включення навантаження, якщо не потрібно чекати натиснення кнопки
BTFSS PORTB, 7
GOTO L22; Перехід на включення навантаження, якщо кнопка натиснена
L41 BSF PORTA, 2
BCF PORTB, 5
MOVLW.4
MOVWF REZ_U
MOVLW.100
MOVWF TEMP
L42 CLRF RTCC
L43 CLRWDT
BTFSC PORTB, 7
GOTO L41
MOVF RTCC, 0
SUBLW.250
BTFSC STATUS, C
GOTO L43
DECFSZ TEMP, 1
GOTO L42
BSF PORTB, 5
GOTO L5; Перехід на включення навантаження
;Процедура блимання світлодіодом «Низьке»
SIGNAL1 INCF TS1, 1
MOVF TS1, 0
SUBLW.30
BTFSS STATUS, C
CLRF TS1; IF TS>128 THEN TS:=0
MOVF TS1, 0
SUBLW.10
BTFSC STATUS, C
GOTO L6
BSF PORTB, 6;TS > .64
RETURN
L6 BCF PORTB, 6;TS < .64
RETURN
; Процедура блимання світлодіодом «Високе»
SIGNAL2 INCF S2, 1
MOVF S2, 0
SUBLW 30
BTFSS TATUS, C
CLRF TS2;IF TS>128 THEN TS:=0
MOVF TS2, 0
SUBLW.10
BTFSC TATUS, C
GOTO 7
BSF ORTB, 4;TS > .64
RETURN
L7 CF ORTB, 4;TS < .64
RETURN
; Процедура блимання світлодіодом «Нормальне»
SIGNAL3 NCF TS3, 1
MOVF S3, 0
SUBLW.30
BTFSS TATUS, C
CLRF TS3 IF TS>128 THEN TS:=0
MOVF S3, 0
SUBLW.10
BTFSC TATUS, C
GOTO 15
BCF ORTB, 5;TS > .64
RETURN
L15 SF ORTB, 5;TS < .64
RETURN
;Процедура виміру рівня мережевої напруги під час півперіода (10ms), результат виводиться через WREG в наступному вигляді:
;0 — U < 145: Необхідно відключити навантаження
;1 — 145 < U < 165 ;Напруга сильно занижена, повинен блимати світлодіод «Низьке»
;2 — 165 < U < 195
;3 — 195 < U < 210
;4 — 210 < U < 230
;5 — 230 < U < 245
;6 — 245 < U < 260
;7 — 260 < U < 275 ;Напруга сильно завишена, повинен блимати світлодіод «Високе»
;8 — U > 275: Необхідно відключити навантаження
LEVEL_U CLRF RTCC;Обнуляем таймер лічильник.
L13 LRWDT
BTFSC ORTA, 0;Якщо викликали процедуру після збільшення напівхвилі мережевої
GOTO 14; напруги то чекаєм його спаду
MOVF RTCC, 0;Якщо після 6мс кінця напівхвилі мережевої напруги
SUBLW U275;не дочекались то рахуєм що U > 275 В
BTFSS STATUS, C
RETLW.8
GOTO L13
L14 CLRF RTCC
MOVLW.5
MOVWF TEMP
L1 CLRWDT
BTFSS PORTA, 0 ;Чекаєм початку фронту імпульсу від мережевої напруги
GOTO L2
MOVF TCC, 0; Якщо після 40мс початку напівхвилі мережевої напруги
SUBLW 250; не дочекались то рахуєм що U < 145В
BTFSC TATUS, C
GOTO 1
CLRF RTCC
DECFSZ EMP, 1
GOTO 1
RETLW
L2 LRF RTCC;Обнуляемо таймер лічильник.
L3 LRWDT
BTFSC ORTA, 0; Чекаєм початку спаду напівхвилі мережевої напруги
GOTO 4
MOVF TCC, 0; Якщо після 6мс кінця напівхвилі мережевої напруги
SUBLW 275; не дочекались то рахуєм що U > 275 В
BTFSS STATUS, C
RETLW .8
GOTO L3
L4 MOVF RTCC, 0; Зберігаєм значення виміряного напівперіоду
MOVWF TEMP
MOVF TEMP, 1;Для помехоустойчивости
BTFSC STATUS, Z
GOTO LEVEL_U
;Визначаем рівень напруги в мережі в протікаючому напівперіоді
MOVLW U165;< 165V
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW.1
MOVLW U165+3
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
MOVLW U195 ;165 < U < 195
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .2
MOVLW U195+3
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
MOVLW U210;195 < U < 210
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .3
MOVLW U210+3
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
MOVLW U230;210 < U < 230
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .4
MOVLW U230+2
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
MOVLW U245 ;230 < U < 245
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .5
MOVLW U245+1
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
MOVLW U260 ;245 < U < 260
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .6
MOVLW U260+1
SUBWF TEMP, 0
BTFSS STATUS, C
GOTO L16
OVLW U275;260 < U < 275
SUBWF TEMP, 0
BTFSS STATUS, C
RETLW .7
RETLW .8; напруга живлення більше за 275 В
16 MOVF REZ_U, 0
RETURN
END
Алгоритм програми приведений на рисунку
Рисунок — Алгоритм програми приладу стабілізатора мереженої напруги з мікропроцесорним керуванням.
7. Розрахунок надійності
Надійністю називається властивість апаратури виконувати покладені на неї функції, при збереженні експлуатаційних показників в заданих межах і режимах роботи, встановлених в технічному завданні і стандартними технічними умовами. Надійність є комплексною властивістю апаратури, що характеризується безвідмовністю і ремонтоздатністю.
Основними показниками надійності є: інтенсивність відмов, напрацювання на відмову, функція надійності. В даному підрозділі виконаний розрахунок надійності системи щодо часткових і повних відмов.
Послідовність приведеного розрахунку така.
Введемо поняття інтенсивності відмов. Ця характеристика визначається експериментальним шляхом для кожної групи елементів і має табличне значення.
Інтенсивність відмов елементів, їх кількість і результати розрахунку загальної інтенсивності відмов системи приведені в таблиці 4.
Таблиця 4 — Параметри надійності радіоелементів
Тип елементу | Інтенсивність відмов елементів і, 1/год | Кількість nі, шт. | і * nі | |
Напівпровідникові ІМС середнього ступеня інтеграції | 0,5*10-6 | 1*10-6 | ||
Резистори | 1*10-6 | 21*10-6 | ||
Конденсатори | 1*10-6 | 7*10-6 | ||
Оптопари | 1*10-6 | 6*10-6 | ||
Діоди | 1*10-6 | 45*10-6 | ||
Автотрансформатор | 2*10-6 | 2*10-6 | ||
Кварцовий резонатор | 1*10-6 | 1*10-6 | ||
Пайка | 0,05*10-6 | 9,5*10-6 | ||
Сума | 92,5*10-6 | |||
Методика розрахунку показників надійності за раптовими відмовами:
згруповуємо елементи з приблизно однаковими значеннями інтенсивності відмов (перший стовпчик таблиці 2);
записуємо значення інтенсивностей відмов для відповідних груп (другий стовпчик таблиці 2);
записуємо кількості елементів в групах (третій стовпчик таблиці 2);
знаходимо добутки і nі, де nі — кількість елементів в групі, і — значення інтенсивності відмов (четвертий стовпчик таблиці 2);
знаходимо сумарну інтенсивність відмов
m — кількість груп елементів;
с =1*10-6 +21*10-6 +7*10-6 +1*10-6 +9,5*10-6 + 6*10-6 +45*10-6 +2*10-6= 92,5*10-6(1/год.)
знаходимо середній час безвідмовної роботи.
Тс=1/92,5*10-6= 108 111 (год.)
необхідно також врахувати умови експлуатації пристрою. Так як розроблений пристрій буде експлуатуватись виключно лабораторних чи прирівняних до них умовах, то Клаб=1, тому середній час безвідмовної роботи пристрою не зміниться.
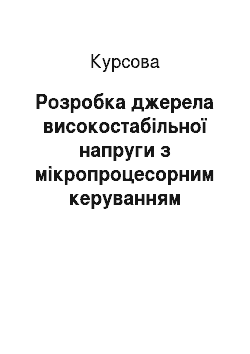
знаходиться ймовірність безвідмовної роботи протягом певного
інтервалу часу P (f) =е-(t/Tc), де P (t) — ймовірність безвідмовної роботи; t — період часу, який нас цікавить; Тс — середній час напрацювання на відмову.
Рисунок 6 — Графік залежності P (t) від часу З графіка, зображеного на рисунку 6, видно, що з часом ймовірність безвідмовної роботи зменшується і на певному етапі вона майже досягає нульового значення.
Щодо залежності інтенсивності відмов від часу, то ця залежність наступна. В момент виготовлення пристрою ймовірність того, що він вийде з ладу є максимальною. Якщо пристрій не вийшов з ладу, то наступає невеликий початковий проміжок часу, який називають періодом припрацювання. В реальних умовах експлуатації цей період складає декілька місяців. Для його скорочення проводиться так зване тестування виробів в умовах, більш жорстких, ніж при реальній експлуатації (термокамери, тряс — машини, мікростенди тощо). Тим самим вдається швидко виявити найменш надійні компоненти і замінити їх.
Після початкового періоду наступає термін експлуатації, протягом якого пристрій виконує всі покладені на нього функції. Цей період сягає 5−10 років.
Останнім є проміжок часу, який наступає після закінчення терміну експлуатації. Це період старіння електрорадіо елементів, що характеризується появою поступових відмов.
8. Розрахунок потужності споживання Потужність, що споживається джерелом високо стабільної напруги з мікропроцесорним керуванням, фактично дорівнює сумі потужностей, що споживаються мікроконтролером, автотрансформатором, діодними мостами, симисторами, діодами, оптопарами, мостом, резисторами та світлодіодами.
Загальна активна потужність, що споживається клавіатурою, Рз, Вт, обчислюється по формулі.
N
Рз =? Ріn, (1)
і=1
де Рз — загальна потужність споживання, Вт;
Рі - потужність, що споживається і-тим елементом, Вт;
N — кількість різних типів елементів, шт.;
n — кількість однотипних елементів, шт.
Для розрахунку потужності, що споживають мікросхеми необхідно використати довідкові дані з загального розділу.
Потужність, яку споживає IМС можна знайти по формулі
Рм = Iсп ср.* Uж, (2)
де Рм — потужність, що споживає IМС, мВт;
Iсп ср. — середній струм споживання мікросхеми, мА;
Uдж — напруга джерела живлення, В.
За формулою (2) розраховуем потужність споживання мікросхем PIC16F84А та КР142ЕН5А від джерела живлення напругою плюс 5 В.
Рм PIC1 = 150 5 = 750 мВт;
Рм КР1 = 10 5 = 50 мВт.
Дані для розрахунку загальної потужності споживання мікросхем клавіатури зведені в таблицю 5.
Таблиця 5 — Потужності споживання мікросхем стабілізатора
Найменування елемента | Кількість елементів і-го типу, n, шт. | Потужність споживання і-го елементу, Рі, мВт. | Потужність споживання n елементів, Ріn, мВт. | |
Мікроконтролер PIC16F84 | ||||
КР142ЕН5А | ||||
Користуючись формулою (1) знаходимо загальну потужність, що споживається мікросхемами від джерела напругою плюс 5 В.
Рм = 800+50 = 850 мВт Потужнiсть споживання свiтлодiода Рс, мВт розраховується по формулi
Рс = Іс * Uсв, (3)
де Iс — середній струм через світлодіод, А;
Uс — напруга на свiтлодiодi, В;
Згідно з формулою (3) потужність споживання світлодіодів складе Рс = 10 * 1,6 = 0,032 Вт Згідно з формулою (3) потужність споживання автотрансформатора ТС-180−2 складе Рт = 220 * 0,05 = 11 Вт Згідно з формулою (3) потужність споживання діодними мостами КЦ407А (два мости) складе при прямому включенню:
Рvd пр. = 2,5 * 0,5 = 1,25 Вт
Інші чотири будуть працювати в зворотньому режимі і потужність їх споживання складе:
Рvd звор. = 275 * 0,0005 = 0,13 Вт Згідно з формулою (3) потужність споживання тиристорними оптопарами АОУ103 В складе:
Рu = 2 * 0,02 = 0,04 Вт Згідно з формулою (3) потужність споживання симисторами КУ208Г в відкритому стані складе:
Рvs відкр. = 2 * 5 = 10 Вт В закритому стані складе:
Рvs закр. = 275 * 0,005 = 2 Вт Згідно з формулою (3) потужність споживання стабілітроном Д814 В складе:
Рvd1 = 9,5 * 0,04 = 0,38 Вт
Згідно з формулою (3) потужність споживання стабілітроном Д814А складе:
Рvd3 = 9,1 * 0,95 = 8,65 Вт Згідно з формулою (3) потужність споживання діода КД243А складе:
Рvd4 = 275 * 0,036 = 10 Вт Згідно з формулою (3) потужність споживання випрямного моста К142ЕН5А складе:
РDA1 = 5,1 * 0,01 = 0,051 Вт Потужність споживання опорами R1-R20 складе:
РR = 0,125 Вт Згідно з формулою (1) загальна потужність споживання стабілізатора напруги з мікропроцесорним керуванням складе:
Рзаг. = Рм + (Рс * 8) + Рт + (Р vd пр.* 2) + (Р vd звор.* 4) + (Р u * 6) + (Р vs відкр.*2)+ +(Рvsзакр.*4) + Р vd1 + Р vd3 + Р vd4 + Р DA1 + (РR * 20)= =0,85+0,256+11+2,5+0,52+0,24+20+8+0,38+8,65+10+0,051+2,5 = 66 Вт Таким чином, потужність споживання пристрою від джерела живлення складає близько 66 Вт.
9. Інструкція з експлуатації
Даний прилад тобто джерело високо стабільної напруги з мікропроцесорним керуванням можна використовувати як в лабораторних умовах так і в закритих неопалюваних приміщеннях. При чому під час роботи даний прилад можна переміщати і точність виміру і якість випрямлення при цьому не погіршаться. Прилад не є ударостійким.
При ввімкненні приладу в мережу живлення необхідно перевірити чи всі з'єднувальні дроти якісно припаяні, чи справна вилка («папа-мама»), потрібно пам’ятати при початку ремонту при розібраному корпусі треба зняти заряд з конденсаторів заземливши їх щоб уникнути ураженню струмом, не під'єднувати більше одного приладу до стабілізатора, прилад призначений лише для мереж живлення з частотою 50 Гц.
Висновки мікропроцесор мікроконтролер джерело високостабільної напруги По отриманому завданню була проведена робота в повному обсязі, було розроблено джерело високостабільної напруги з мікропроцесорним керуванням. Була написана для даного приладу програма на мові програмування ASSEMBLER, розглянуті питання по програмуванні МК. При виконанні даної роботи був здобутий великий і доволі цінний досвід розробки подібних приладів на мікропроцесорах, а також написання програм системного характеру. Також були закріпленні знання отримані на лекціях та на мікропроцесорній практиці.
Розроблено джерело високостабільної напруги з мікропроцесорним керуванням і даний прилад відповідає вимогам, які вказані в завданні. Стабілізація напруги від 145 до 275 В і частотою 50 Гц, амплітуда вихідної випрямленої напруги від 145 до 275 В. Також розрахована надійність та середній час безвідмовної роботи — 108 111 годин. Загальна потужність приладу яка була розрахована в восьмому розділі записки складає близько 66_Вт. Технічні характеристики джерело високо стабільної напруги з мікропроцесорним керуванням, отримані в розрахунках, відповідають завданню на курсовий проект.
Література
1. http:/www.microchip.ru/.
2. Никифоров И. «Упрощёний расчёт сетевого трансформатора» — Радио 2000, № 10, с. 39.
3. Журнал Радио, 2002, № 8, с 26.
4. http:/www.pic 16f84.narod.ru/.
5. http:/www.radio.ru/.
6. Електронний підручник з предмету «Основи електроніки та електрорадіоматеріалів» викладача ХПК Сівка А. Ф.
7. Аналоговые и цифровые интегральные микросхемы. Справочное пособие под ред. С. В. Якубовского.-М.: Радио и связь, 1985
8. М. И. Богданович Цифровые интегральные микросхемы. Справочник Нинок: Беларусь, 1991.
9. К. А. Нешумова Электронные вычислительные машины и системы — М. Высшая школа, 1989.
10. Угрюмов В. П. Проектирование элементов и узлов ЭВМ — М.: Высшая школа, 1989.
11. Л. Н. Преснухин Расчёт элементов цифровых устройств — М.: Высшая школа, 1991.