Дорожні контролери.
Дорожні контролери
Для вирішення питань гнучкої логіки використовуються мікропроцесорні системи (МГТС) різних рівнів складності, апаратного та програмного рішення. До складу МПС входять численні взаємопов'язані електронні пристрої: один або кілька мікроконтролерів (МК), призначених для обробки інформації та керування; пам’ять — для зберігання програм і даних, пристрої введеннявиведення — для передачі… Читати ще >
Дорожні контролери. Дорожні контролери (реферат, курсова, диплом, контрольна)
За конструктивною ознакою реалізації блоків дорожніх контролерів (ДК) вони можуть бути виконані на базі електромеханічних, електронно-релейних або повністю електронних схем. Останні виготовляють на дискретних елементах (потенційно-імпульсні схеми) або на інтегральних мікросхемах, а сучасні - на базі мікроконтролерів. Прикладом найпростішого ДК, що широко використовувався для локального керування на перехрестях ше із 30-х років минулого століття та зустрічається ше і сьогодні, є електромеханічні пристрої.
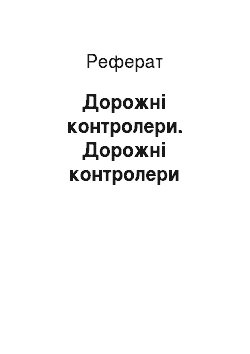
У цьому контролері логічний пристрій реалізовано у вигляді профільних кулачків, профіль яких визначає співвідношення фаз світлофорів. Кулачок З обертається від двигуна 1 через редуктор 2, передавальне число якого вибирається залежно від загальної тривалості одного циклу перемикання. Положення кулачка 3 впливає на перемикання контактної групи 4, яка перемикає поляризоване реле б.
Залежно від напрямку струму в реле, воно вмикає лівий 7 або правий контакт 5 та відповідно певну групу світлофорів 8 контрольованого перехрестя. Контакти кулачка живляться слабким постійним струмом для зменшення підгоряння контактів. Через контакти реле проходить потужний струм 220 В для живлення ламп світлофорів.
РисунокКонструкція електромеханічного ДК.
Тривалість червоного сигналу дорівнює часу ковзання контакту по тій частині профільованого диска, яка відповідає червоній фазі. Після червоного сигналу вмикається жовтий, потім зелений, жовтий і знову червоний. Автомат може керувати одночасно декількома світлофорами одного перехрестя. Для зміни тривалості фаз потрібна заміна кулачка, що є незручною ручною операцією.
Широке розповсюдження серед вітчизняних дорожніх контролерів першого покоління набули ДК із застосуванням крокового двигуна, який обертав із постійною швидкістю контактний барабан, контакти якого замикали силові лінії ламп світлофорів. Програма керування реалізовувалась шляхом установлення певного положення контактів на контактному барабані. У 70-х роках XX століття на зміну кроковим двигунам прийшли релейні дорожні контролери. На території колишнього СРСР було встановлено безліч релейних уніфікованих контролерів КК-2, які й нині, хоча вже давно незаконно, працюють на перехрестях.
контролер дорожній електронний логіка.
Рисунок — Загальний вигляд контролера КК-2.
КК-2 нічого не контролюють, а тільки перемикають ланцюги навантаження світлофорних ламп. Програма керування у КК-2 реалізовувалась шляхом установлення визначених проміжків часу перемикання реле. Перегоряння ламп світлофорів ніяк не реєструється контролером.
Технологічним кроком розвитку середини 80- X років стало упровадження дорожніх контролерів на напівпровідникових приладах. Такий контролер — це електронний вузол, блок або прилад, який виконує обробку вхідних сигналів та формує видачу вихідних керуючих сигналів на світлофор
Як вхідні або вихідні сигнали можуть використовуватися аналогові або цифрові сигнали від датчиків дорожнього руху, одиночні дискретні сигнали або цифрові коди з табло пішохода, послідовності цифрових кодів з дистанційного пульта поста ДАІ. Залежно від виду сигналу, використовуються відповідні схеми перетворення та узгодження вхідних сигналів, тому що вхідні пристрої працюють при малих електричних струмах. Якщо система цифрова, то вхідні аналогові сигнали перетворяться на послідовність кодів за допомогою аналогоцифрового перетворювача, підсилюються підсилювачем П, а вихідні аналогові сигнали формуються з послідовності цифрових кодів за допомогою цифроаналогового перетворювача та також підсилюються для виходу на потужні лампи світлофорів. Усередині системи може проводитися зберігання, накопичення сигналів (чи інформації) та їх обробка.
Пунктирним контуром позначені варіативні блоки електронного ДК, які вирисовуються у міру необхідності. Характерною особливістю традиційних цифрових систем є той факт, що алгоритм обробки та зберігання інформації у них тісно пов’язаний з схемотехнікою системи, тобто для конкретно поставленої задачі розробляється та реалізується конкретна електронна схема.

Рисунок — Загальний вигляд контролера жорсткої логіки.
Будь-яка зміна вихідних умов завдання спричинить за собою і зміну її схемотехнічного рішення, тому зміна алгоритму функціонування системи можливе лише шляхом зміни її структури. Такі схеми називають схемами жорсткої логіки. Керування світлофорним об'єктом відбувається автоматично.
Однак нерідко виникає необхідність у ручному керування перехрестям (зміна програми, спецрежими, налагодження контролера). Для цього існує пульт керування інспектора, який може бути вбудованим або виносним.

РисунокПульт інспектора.
Останній передбачений для зручності роботи оператора — інспектора ДА1, керуючого рухом безпосередньо на перехресті.
Для вирішення питань гнучкої логіки використовуються мікропроцесорні системи (МГТС) різних рівнів складності, апаратного та програмного рішення. До складу МПС входять численні взаємопов'язані електронні пристрої: один або кілька мікроконтролерів (МК), призначених для обробки інформації та керування; пам’ять — для зберігання програм і даних, пристрої введеннявиведення — для передачі та перетворення інформації від периферійних пристроїв до мікропроцесора і назад; а також ряд інших пристроїв, призначених для зв’язку МК із зовнішнім світом. Центральним пристроєм будь-якої мікропроцесорної системи (МПС) є мікроконтролер — спеціалізований мікропроцесор. Інші пристрої МПС виконують допоміжні функції: зберігання інформації (програм і даних), зв’язок з периферійними пристроями. Пристроєм, що забезпечує керівництво спільною роботою всіх внутрішніх пристроїв МПС і допоміжних пристроїв, є все той же мікроконтролер.
Отже, мікроконтролер (МК) можна визначити як програмно-керовану електронну схему, призначену для обробки цифрової інформації, керування процесом цієї обробки, а також керування роботою пристроїв, що входять до мікропроцесорної системи (рис. $.18). З’явилася серія дорожніх контролерів ДКМ, БДК, які реагують на позаштатні ситуації на світлофорних об'єктах. ДКМ можуть працювати з детекторами транспорту (індуктивними, ультразвуковими) та взаємодіють із центром керування міським дорожнім рухом по кабельних каналах зв’язку (рис. 8.19).
Центр керування та дорожні контролери утворюють агрегатну систему керування дорожнього руху АСКДД Одночасно з появою дорожніх контролерів ДКМ, БДК з’являлися інші аналоги. Сучасні дорожні контролери випускаються як універсальні із фіксованою кількістю каналів керування — 16, 24, 48, що дозволяє використовувати ті моделі, які відповідають конкретній кількості світлофорних об'єктів.

РисунокБлок-схема МПС контролера БДК.

РисунокЗагальний вигляд контролера ДКМ.
Програмування контролерів під конкретні задачі перехресть виконуються на звичайній персональній ЕОМ і вводяться до контролера безпосередньо з ПК по лініях зв’язку або за допомогою інженерного пульта програмування.
У сучасних автоматизованих системах керування дорожнім рухом, поширених у більшості європейських країн, широко використовується інформація від відеокамер на перехрестях, що входять до складу систем локального відеоспостереження [33]. Перевагою систем відеоспостереження є поєднання числової та візуальної інформації. Отримана інформація після обробки дозволяє організувати оптимальне керування транспортними потоками, скоординувати роботу ключових транспортних вузлів міста. Можлива організація моментального зворотного зв’язку з оператором системи, диспетчером центра керування при виникненні нештатних ситуацій.
Системи відеоконтролю надають дані трьох типів: інформація відносно трафіка для статистичної обробки (число автомобілів, їх швидкість, прискорення, зайнятість смуг руху, тип автомобілів, щільність потоку); інформація про пригоди на дорогах (наявність заторів, зупинка транспорту, рух по зустрічній смузі); інформація щодо присутності/відсутності автомобілів у зоні спостереження.